【連載・全3回】 ロボットテクノロジージャパン2024 京セラ展示の技術紹介(2)
京セラは、7/4~6に愛知県国際展示場で開催したロボットテクノロジージャパン2024(RTJ)に出展いたしました。
弊社ブースにお越しいただきました皆様、誠にありがとうございました。
前回に引き続き、全3回にわたってRTJで展示した実機によるデモの技術を紹介いたします!
京セラのデモはどのような技術で実現しているのでしょうか?
本記事をお読み頂き、弊社の技術を一層ご理解頂けますと幸いです。
第2回はデモンストレーション② バラ積み金属薄板の整列配膳作業の自動化についてです。
デモ内容について以下の記事もご参照ください。
バラ積みの金属薄板ワークでもAIと3Dビジョンで正確にピック
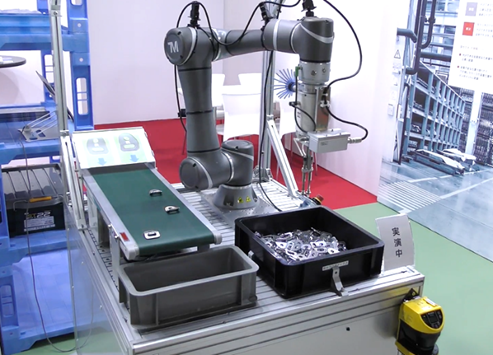
本デモではロボットがトレー内にばら積みされた金属薄板(厚み0.5mm)をピックし、仕切り付きのトレーに向きを揃えて一枚ずつ重ねてプレイスする作業を行いました。
弊社が提供する「京セラロボティックサービス」(https://www.kyocera.co.jp/prdct/robotics/)によって知能化されたロボットが複雑に重なり合った金属薄板を正確に認識することで実現しています。
この認識に使用されているAI技術がインスタンス・セグメンテーションです。インスタンス・セグメンテーションに関しては、前回の記事を参照ください。
ワークを吸着してピックするには”一枚”単位でワークを認識する必要があります。しかしながら、薄板のバラ積みの場合はワーク同士が複雑に重なり、人の目でも一枚一枚を正しく認識する事は難しくなります。この様なケースでは、ピックに失敗するケースが増えます。
京セラは独自のAI技術により金属で光沢のある薄板ワークを一枚ずつ認識する事ができます。
以下がワーク選択までの一連の流れとなります。バラ積みされ“一枚“単位の識別が難しい状態でも、しっかりと認識できていることがわかります。

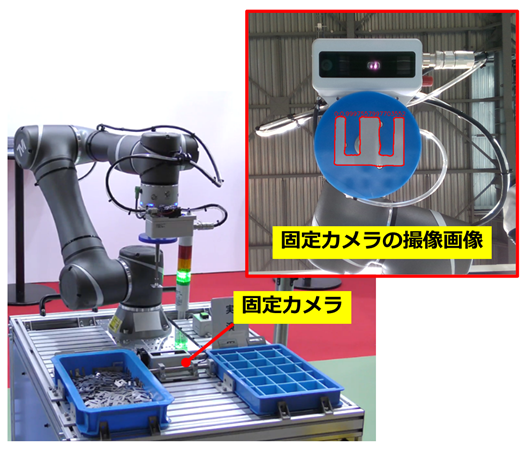
また、本デモではワークをピック後に固定カメラを使って吸着姿勢を推定する事で、ワークが綺麗に重なった整列配膳を実現しています。さらに本ワークは共連れし易い形状の為、複数枚ピックした事を同じ固定カメラで検出して、トレーに戻しています。これらの認識にもAI技術が使われています。
これらの作業を実現するにはAIモデルの作成が必要です。しかし、各作業現場に応じたAIモデルを開発するには、元となるAIモデルの選定、学習データの準備、また学習方法のノウハウが必要となります。特に、製造現場で安定して動作するAIモデルを開発するには高度なスキルが必要となります。
「京セラロボティックサービス」ではお客様のワークやトレーなどに最適化された認識モデルを京セラが作成いたします。さらに、運用後のAIモデルのメンテナンスもサービスに含まれております。この為、お客様はAI技術の習得や人材獲得にコストを費やす必要がなく、お客様の事業の付加価値を生み出す作業にリソースを集中させる事ができます。
京セラロボティックサービスについて内容を詳しく知りたい方はお気軽にお問合せください。
次回の連載では、デモンストレーション③ ばら積み光沢金属部品の搬送作業の自動化の技術紹介をします。
ご相談・お問い合わせ
受付 9:00-12:00/13:00-17:00(土曜、日曜、祝日および当社指定休日は除く)
受付後、詳細について専門担当より折り返しご連絡させていただきます。

